Bliss Reading Group - July 6
Presented by: BLISS Berlin
Monday, July 6, 2026
06:45 PM GMT+2
Monday, July 6, 2026
08:00 PM GMT+2
Price
Free
Free entry
About the Event
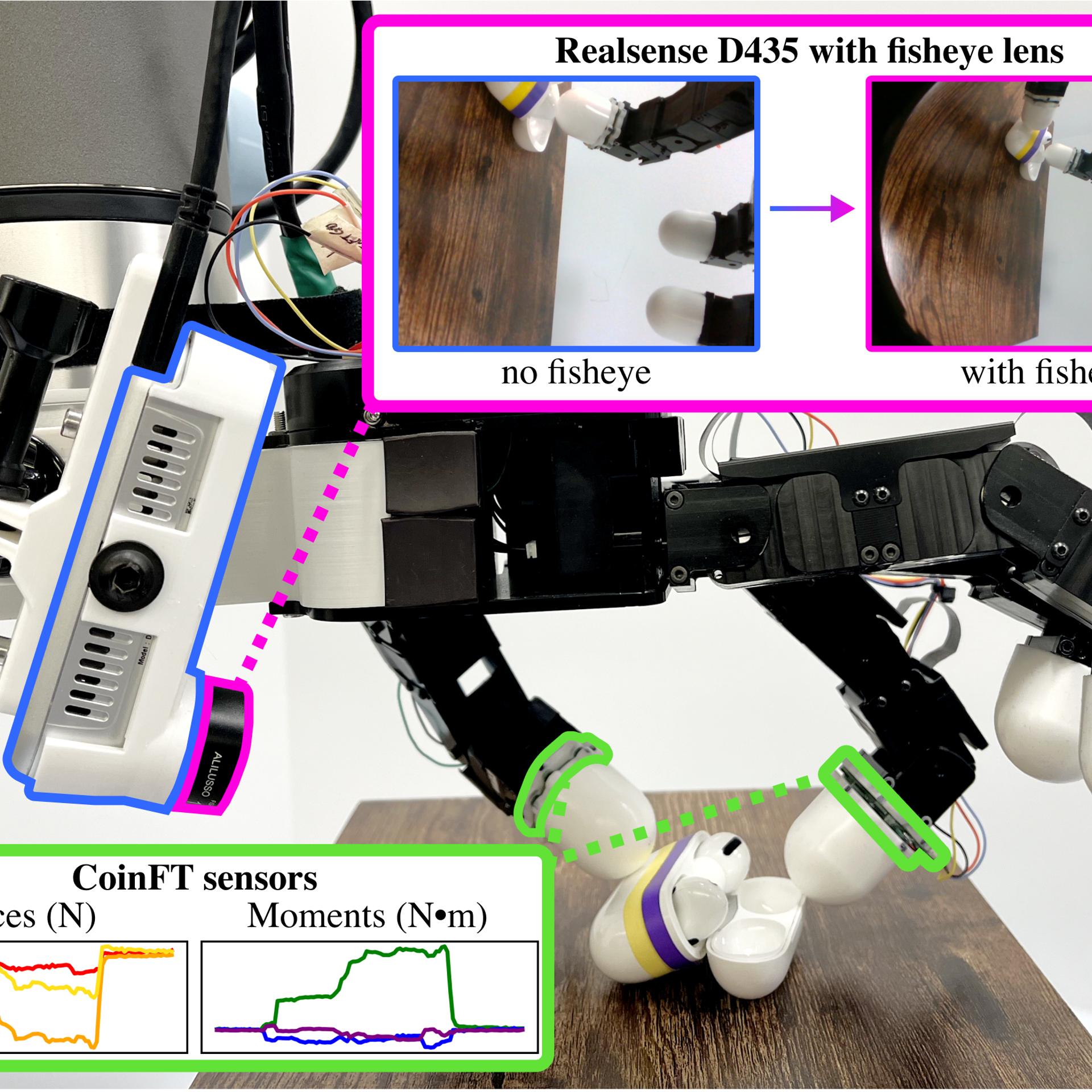
Continuing our mini-track on robot perception for physical interaction, we move from sensing contact to acting on it — specifically, how force information can make robot learning from demonstration dramatically more effective. Our paper is DexForce: Extracting Force-Informed Actions from Kinesthetic Demonstrations for Dexterous Manipulation (Chen et al., 2025). Imitation learning for dexterous manipulation faces a fundamental problem: the demonstrations need to capture not just where the fingers go, but how hard they push. Common approaches like teleoperation with motion retargeting lose this force information entirely, and it turns out that matters enormously. DexForce addresses this by having a human guide the robot hand directly (kinesthetic teaching) while recording contact forces from sensors at each fingertip. These force measurements are then used to compute "force-informed actions" for policy learning. The results are striking: policies trained with force-informed actions achieve a 76% success rate across six manipulation tasks, while policies trained on position-only actions — ignoring forces — achieve near zero. This pairs well with SonicBoom: where that paper showed acoustic sensing can localise where contact happens, DexForce shows that capturing how much force is applied can be the difference between a functional policy and a useless one. What kinds of tasks are most sensitive to force information? Could force-aware demonstrations eventually be collected without kinesthetic teaching? And what does the near-zero baseline tell us about what current imitation learning pipelines are actually missing? Join us for a lively and interesting discussion!
Venue Details
Merantix AI Campus
Merantix AI Campus, Berlin, Berlin
Explore nearby
Free for Visitors
Organized by
Tap "I'm attending" above first. Once you do, you can meet the right people at this event.